Autonomous Ground Vehicles
Robust, all-terrain unmanned ground vehicles built for any mission.

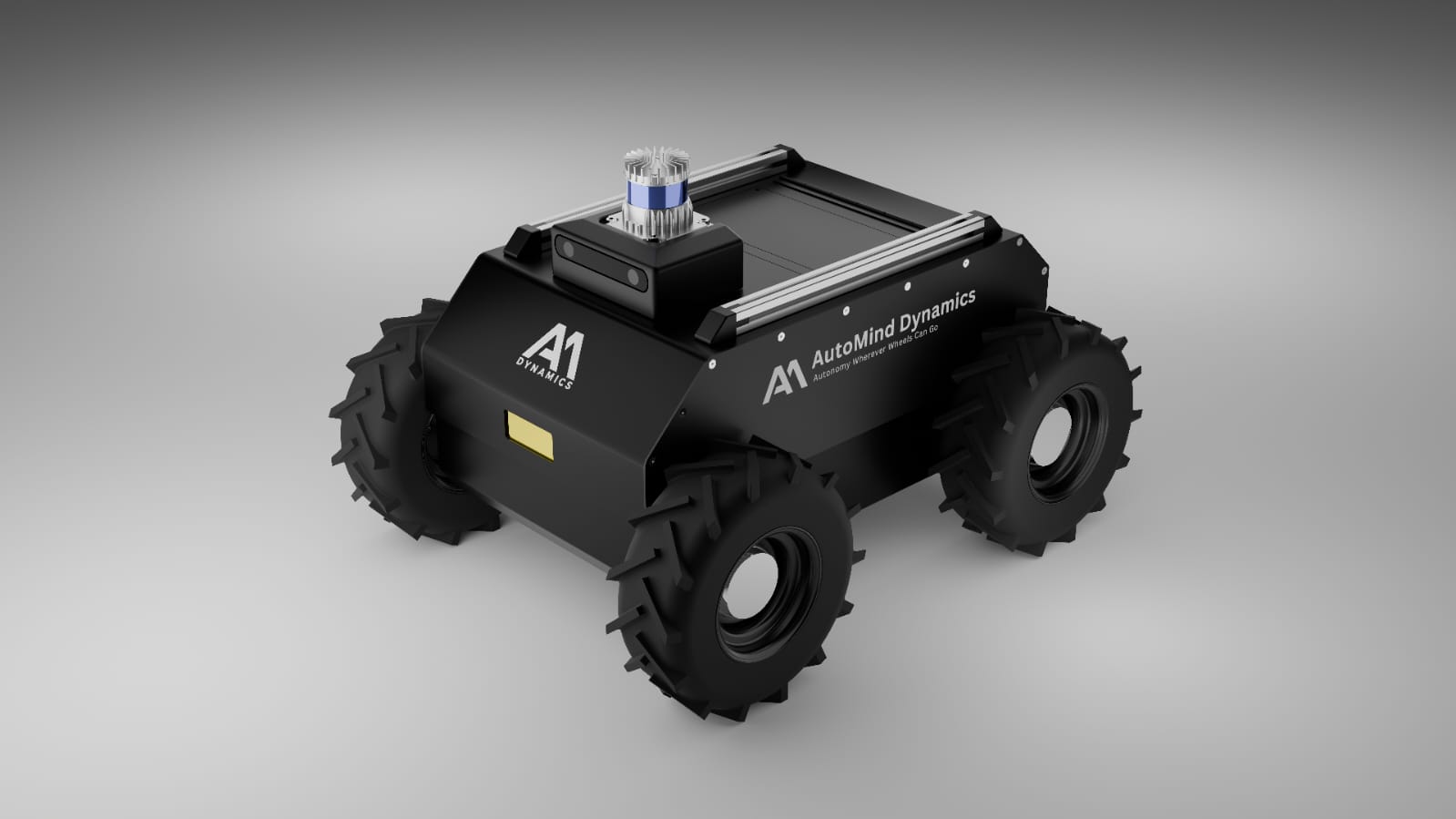
GEFIER R1
Compact All-Terrain UGV
Nomad Explorer
Medium-Duty Exploration Platform
The Nomad Explorer is a versatile, medium-sized UGV built for long-range missions and heavy sensor payloads. It features hybrid-electric power for extended operational range and advanced suspension for high-speed, all-terrain mobility.
Grizzly UGV
Coming Soon
The Grizzly UGV is currently in development. Stay tuned for our most powerful autonomous ground vehicle.
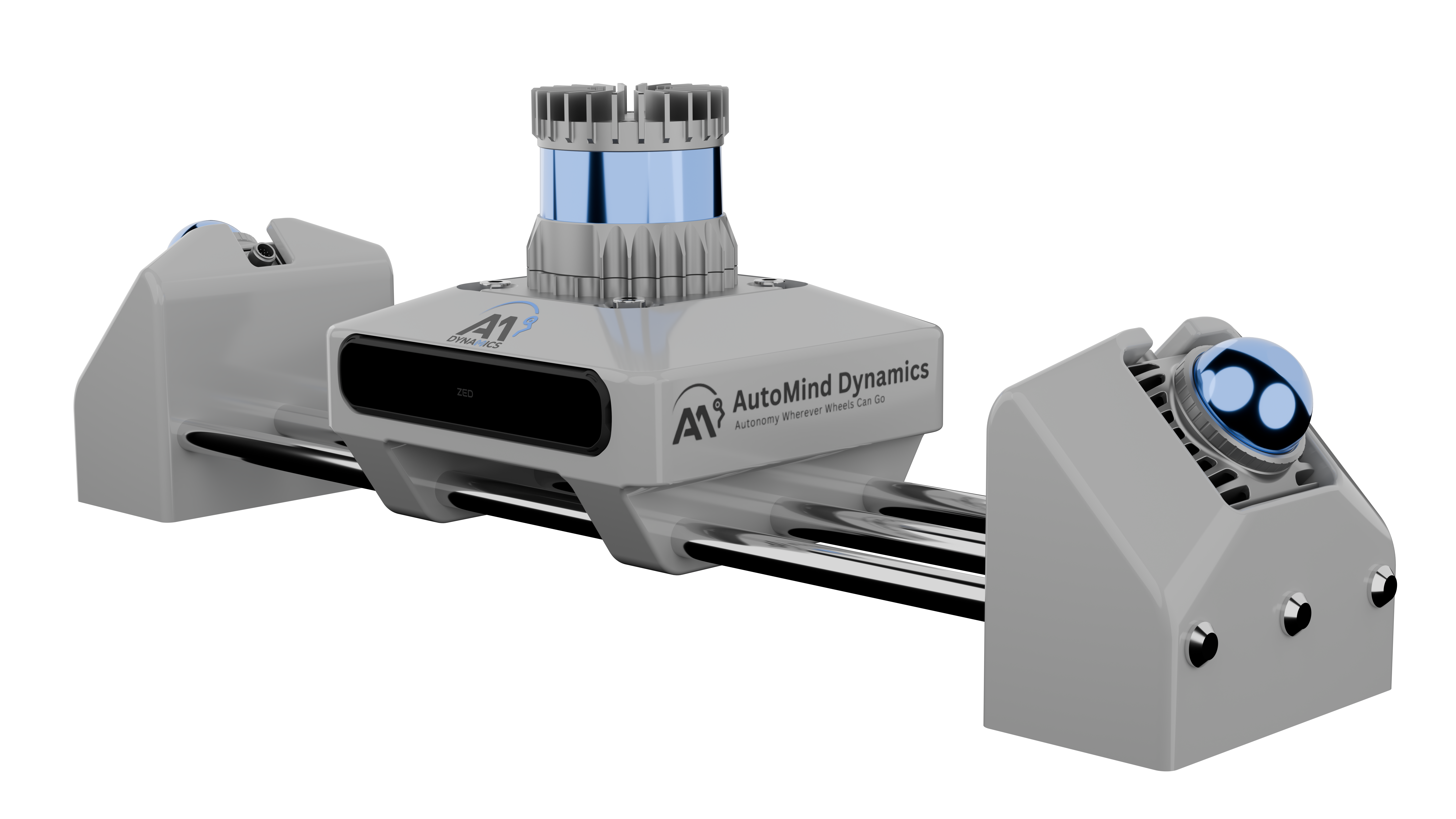
Sensor Suite
360° Perception System
AutoMind Dynamics’ hand-held sensor suite is a rugged, multi-modal perception system designed for rapid 3D mapping and reconstruction in GPS-denied and unstructured environments. The system enables high-accuracy spatial data capture for terrain modeling, site surveying, and mission planning, feeding directly into autonomy and simulation workflows.

TRAx Controller
Terrain-Ready Autonomy Extension
The TRAx Controller is a vehicle-agnostic autonomy kit. It provides the central compute, networking, and power distribution required to run our advanced software, plus the drive-by-wire actuation to control any vehicle. This allows for rapid retrofitting of existing fleets.

HyperSim
Physics-Based Simulation
HyperSim is our high-fidelity, physics-based simulation environment. We use it to train, test, and validate our AI in millions of virtual scenarios, from routine driving to high-risk edge cases, ensuring safety and reliability before a single wheel touches the ground.